很多人認為下雨就是自動駕駛路測中的災難,雨水很容易對激光雷達等傳感器造成干擾。真實情況是這樣嗎?本文Ouster工程師 Raffi Mardirosian 分享了Ouster激光雷達在雨中測試時的真實表現,該傳感器經過精心設計,能經受工業應用中苛刻的使用條件和不可預測的使用環境的考驗——如在暴雨中駕駛、浸泡在水中、洗車機清洗以及車規級沖擊和振動。

在過去的12個月里,我們看到了很多關于激光雷達在雨中失效的觀點,其中的大多數是毫無數據根據的猜測,比如下面的評論:
作為激光雷達的生產和研發方,當我們讀到這些荒謬的推文時,我們的反應如下圖:
與自動駕駛行業密切的合作經驗告訴我們,激光雷達傳感器和攝像頭在自動駕駛技術系統中都發揮著重要作用。攝像機為系統提供了高分辨率的紋理細節,而激光雷達傳感器則貢獻了高可靠性的深度信息。也就是說,在其中一個傳感器可能會發生性能下降的情況下(比如在雨中),另一個傳感器可以繼續正常工作,起到彌補對方不足與提升系統整體可靠性的作用。
所以讓我們回到推特上的這些評論。從中我們可以看到大家都在討論同一個問題,即激光雷達在雨中的真實性能表現,但是否真正有人實測過呢?我們的谷歌搜索結果告訴我們,答案是幾乎沒有。所以我們認為驗證這些觀點的最好方式,就是進行一場激光雷達雨中駕駛測試。
上個月,舊金山下了第一場雨時,我們進行了一次雨中駕駛測試。我們在車頂并排安裝了一個GoPro攝像頭和Ouster的 OS1激光雷達,同時錄制4K高清視頻和激光雷達的點云數據。在此次測試中,一直下著中雨,我們的車輛沿著舊金山的街道行駛。
從下面的視頻中可以發現,事實證明降雨對我們激光雷達數據的影響微乎其微。潮濕的環境是許多場景中的一種,在這些復雜場景中,需要同時使用這兩種傳感器使感知系統更安全、更強大。
查看駕駛時的錄像:
如果你對測試感興趣,可以在此處下載2分鐘左右的原始數據,也可以在智車科技后臺回復關鍵詞“ouster”下載資料
https://pan.baidu.com/s/1zjHyCdQt6AYy_mC9nwUVBA
提取碼: qq6f
利用Ouster開源驅動(https://github.com/ouster-lidar/ouster_example)進行查看。
與激光雷達相比,降雨對相機的影響更大
在視頻中,右上角的三張2D圖像是激光雷達輸出的結構化數據全景圖——沒有使用攝像頭,完全靠Ouster激光雷達本身生成:頂部圖像來自于激光雷達捕獲的環境光成像(自然光);第二幅圖像是強度信號形成的灰度圖(反射回傳感器的激光強度);第三幅圖像是深度圖(反應傳感器的距離深度信息,或者依據反射回波計算得到的距離深度信息)。
下圖可以看到,即使激光雷達傳感器的外層玻璃上有水滴,也不會影響激光雷達強度和深度信號的圖像。最上面的環境圖像呈現顆粒狀,因為云層減少了日光量,但仍然沒有受到玻璃上雨水的影響,可以正常成像。
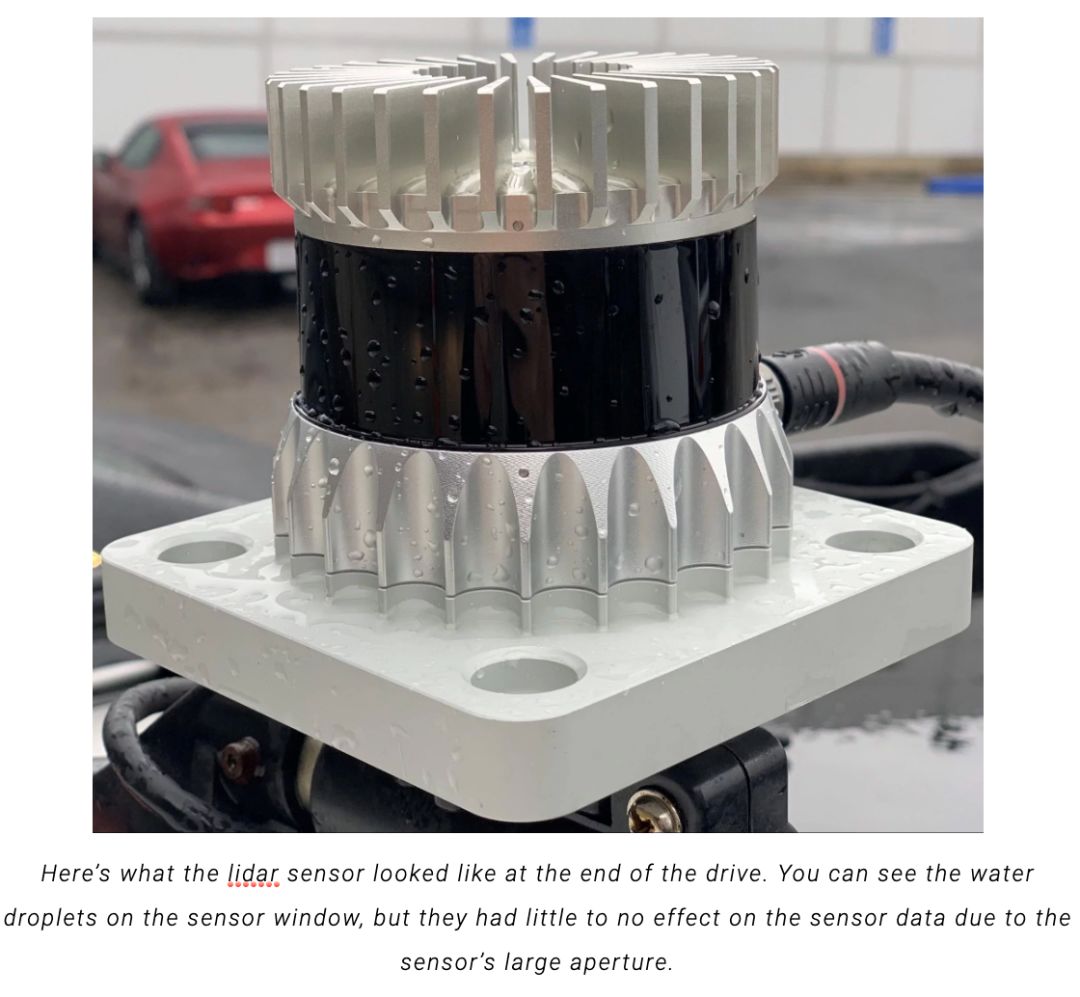
這是在雨中開過后雷達的樣子。你可以看到傳感器的玻璃上有水滴,但是這個對我們傳感器的數據沒有影響,原因是傳感器內部擁有更大的光學光圈。
Ouster的OS1激光雷達之所以具有穿透窗口上遮蔽物(在這種情況下是水滴)的獨特能力,其中一個因素是傳感器的大光學孔徑鏡頭,這是由我們的數字激光雷達技術實現的。大光圈使得光線可以繞過傳感器窗口上的遮蔽物。帶來的結果是傳感器的測程因雨水而略有縮小,但圖像完全不會因雨水而失真。
大孔徑光圈還可以讓傳感器感知飄在空中的雨滴周圍的情況。盡管降雨量比較大,但傳感器不會捕獲飄在空中的雨水,實際提供的還是周圍真實環境的信息。從第二幅信號強度的灰度視頻可以明顯的看到這點。
作為對比,普通的攝像頭傳感器的光圈比雨滴小得多。因此,單個雨滴可能會遮蔽視野中可能包含關鍵信息的大片區域。為了克服這種失真,汽車制造商不得不開發清洗系統解決方案,以防止攝像頭鏡頭上產生積水和污垢。
曝光時間是影響激光雷達和攝像頭在雨中表現的另一個重要因素。人眼和攝像頭都有很長的曝光時間(以千分之一秒為單位),這使得下降的水滴在圖像中看起來如條紋狀,雨水看起來比實際密度更大。Ouster的激光雷達具有以百萬分之一秒為單位的超快曝光快門,因此在測量過程中雨水被有效地凍結在原位,而不會被檢測為跨越多個像素的條紋狀圖像。

最后,激光雷達傳感器處理回波的特點,使它們在特定范圍內穿透遮蔽物(如降雨)時候具有明顯的優勢。激光雷達提供的是“帶深度信息的圖像” 。激光雷達不是像相機一樣僅僅將沿像素方向返回的所有光子強度疊加在一起,而是將回波光子按照時間序列整合到一系列“距離門”。
從該時間序列中,我們只挑選出傳感器中每個像素返回的最強信號(單回波)。這使得我們可以忽略其他較弱的干擾信號,比如雨滴的反射和潮濕的傳感器窗口的反射。
相比之下,攝像頭沒有能力區分空氣中的雨和雨后堅硬物體的回波信息。所有的光子都被收集到每個像素中,體現在強度疊加值里,沒有多信號返回的概念。Ouster的OS1激光雷達能夠忽略從雨滴返回的信號,并在所有回波信號當中挑選出最強的,如雨滴后的建筑物回波。而攝像頭則并無法忽略來自雨滴的信號,而是簡單將來自雨滴的信號與從雨滴后面的建筑物返回的信號疊加起來,這種綜合信號使其輸出的圖像失真。
由于光圈大小和快門速度的原因,激光雷達傳感器產生的圖像失真比相機少得多。當然,激光雷達傳感器也并不是完全沒有受到影響——畢竟在潮濕的環境下,光線是從潮濕的光路上反射出來,這對相機和激光雷達傳感器都構成了挑戰。
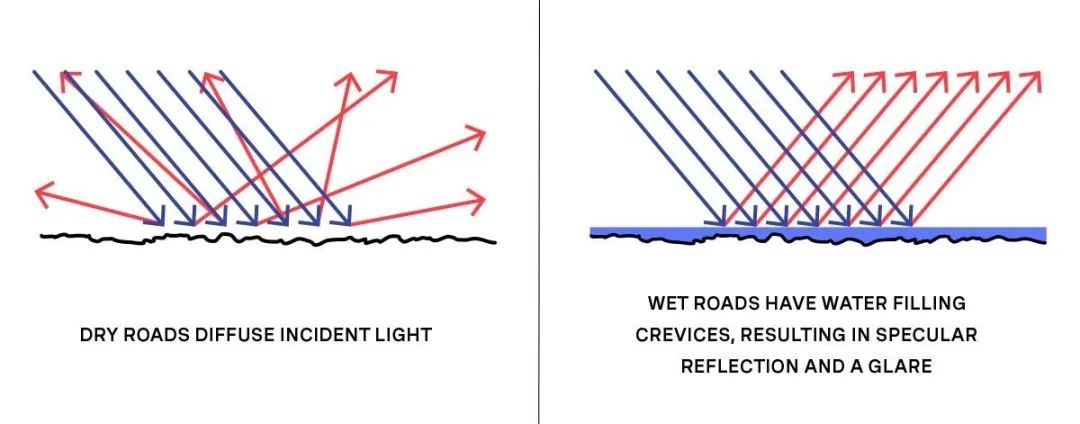
水把道路變成了鏡面
在潮濕的道路上,水就像鏡面一樣,鏡面反射光的模式與在干燥條件下路面完全不同。這種反射給兩個傳感器都帶來了挑戰,給相機的成像感知造成了混亂,并縮小了激光雷達傳感器的探測范圍。在干燥的道路上,粗糙的瀝青路面會散射光線,使激光向四面八方漫反射。但在潮濕的道路上,水將道路變成不完美的鏡面,就像一面鏡子反射了一部分光線。
對于攝像頭來說,挑戰來自于道路上出現的反射,這些反射可能會產生混亂的物體鏡像。在下圖中,您可以看到汽車的前照燈在潮濕的地面上產生了倒影鏡像。對于裝有物體識別軟件的攝像頭來說,這可能會使系統發生認知混淆,誤以為存在第二輛車,或者誤以為這輛車可能比實際距離更近。

雨中汽車大燈的倒影
對于激光雷達來說,類似情境下不利的影響是,傳感器在路面上的測程縮小。激光雷達傳感器發出的一部分激光在道路上的水面上直接反射,逃離傳感器方向。這意味著傳感器將接收不到遠距離的路面信息。我們的激光雷達對于其它物體(比如汽車、建筑物、樹木等)的探測范圍卻可以不受該影響。
下面的動圖中看到,它展示了雨天和晴天的點云效果。建筑物在雨中能見度變化不大,但由于道路的鏡面反射,路面能見范圍在雨中縮小了。
并不是所有的激光雷達天生都是一樣的
Ouster傳感器在雨中的強勁性能并不一定代表所有的激光雷達都能有這樣的表現。我們的傳感器經過精心設計,能經受工業應用中苛刻的使用條件和不可預測的使用環境——如在暴雨中駕駛、浸泡在水中、洗車機清洗以及車規級沖擊和振動。
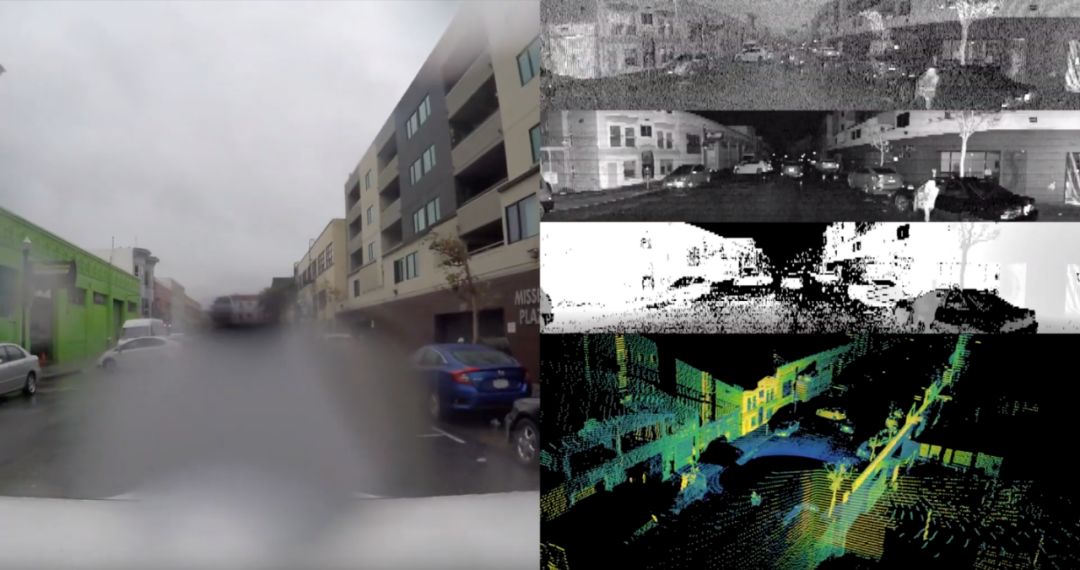
Ouster 激光雷達在舊金山街道雨天實際錄制的數據,左側為攝像頭,右側上方為利用激光雷達產生的360°環視圖,右一位環境圖,右二為反射強度圖,右三為距離信息圖。右下為激光雷達點云輸出。
在其他商業化的激光雷達技術中,傳統的模擬信號旋轉激光雷達傳感器和MEMS微振鏡激光雷達傳感器由于孔徑較小,往往在雨中駕駛時表現欠佳。就像我們演示中的攝像機一樣,傳統激光雷達的成像會被小雨滴扭曲。此外,傳統的模擬信號激光雷達或MEMS微振鏡雷達的防水等級都沒有高于IP67的(Ouster激光雷達的防水等級均為IP68和IP69K),也沒有通過標準的車輛沖擊和振動測試,這使得它們在崎嶇的道路或潮濕的環境下很容易發生故障。
多樣性是關鍵
這場雨中駕駛測試突出表現出不同的環境條件對不同傳感器的性能產生不同影響。這并不是要抨擊、或者宣稱攝像頭是不必要的。攝像頭提供了關鍵的高分辨率紋理信息,與激光雷達和雷達點云深度數據相結合,能夠使自動駕駛汽車綜合感知系統更加強大,適應更復雜與苛刻的環境。
當然,這場雨中駕駛測試也證實了攝像頭在雨中的性能衰減會比激光雷達更顯著(至少跟Ouster的激光雷達相比是如此)。在這些復雜場景下,不同類型的傳感器數據融合可以降低感知系統出錯的風險。感知架構當中,傳感器的多樣性與冗余度是自動駕駛汽車安全商用推廣的關鍵。
在接下來的一年里,敬請期待Ouster激光雷達傳感器能夠適應更加苛刻復雜的環境,并一如既往的表現出更加可靠與出色的性能!