[ 追蹤熱點 深度報道 ]
IEEE Spectrum:自動駕駛汽車應該小而慢
本文介紹了由劉少山成立的PerceptIn公司在自動駕駛領域的發展。
目前,越來越多年輕的城市居民不想買汽車了,而且與前幾代人不同,他們不必完全依靠公交車出行,需要去很遠的距離(例如超過8公里)時,他們會使用手機來召喚Uber(或滴滴)。如果他們出去在2公里之內,他們要么步行,要么使用各種共享自行車等。
問題在于,當今的“移動即服務”生態系統通常無法很好地覆蓋中間距離(例如幾英里)。租用這樣的短途旅行的Uber或Lyft證明是昂貴的,而且騎踏板車或自行車超過1英里左右可能對許多人造成負擔。因此,去1到5英里之外的目的地可能是一個挑戰。然而,此類旅行約占旅客總行駛里程的一半。
這些中距離旅行中的許多旅行都是在交通有限的環境中進行的,例如大學校園和工業園區,從經濟上和技術上來說,現在都可以部署由電力驅動的小型低速自動駕駛汽車。著名的《第一本無人駕駛書》的作者劉少山成立的PerceptIn公司是其中一家,在日本奈良和福岡的旅游景點擁有自動駕駛汽車,在中國深圳的工業園區,并且剛剛在公司總部所在地印第安納州費舍爾附近部署了車輛。
由于這些小型自動駕駛汽車每小時的速度不會超過20英里(32公里),并且不會與高速交通混在一起,因此不會像在普通道路和高速公路上行駛的自動駕駛汽車那樣引發安全隱患。盡管自動駕駛是一項復雜的工作,但PerceptIn的真正挑戰不是在這樣的環境中制造出能夠自行駕駛的車輛,而是要降低成本。
鑒于目前無人駕駛汽車的生產量仍然很昂貴(一種實驗模型可能使您花費約300,000美元),以更低的價格出售任何一種自動駕駛汽車幾乎是不可能的。PerceptIn 過去幾年的經驗表明,實際上,今天有可能生產出更加經濟的自動駕駛乘用車:PerceptIn的汽車目前售價約為7萬美元,而且價格肯定會在未來下降。
為什么自動駕駛汽車通常如此昂貴
簡而言之,這是因為它們所攜帶的傳感器和計算機非常昂貴。
自動駕駛所需的傳感器套件通常包括高端衛星導航接收器,激光雷達(光檢測和測距),一個或多個攝像機,雷達和聲納。該車輛還需要至少一臺功能強大的計算機。
在這種情況下使用的衛星導航接收器與您手機中的衛星導航接收器不同。自動駕駛汽車內置的這種機器人具有所謂的實時運動功能,可精確定位到10厘米。這些設備的價格通常約為4,000美元。即使這樣,也不能完全依靠這種衛星導航接收器來告訴車輛在哪里。在衛星信號從附近建筑物反彈,引入噪聲和延遲的情況下,可能無法解決問題。無論如何,衛星導航都要求天空無遮擋。在封閉的環境(例如隧道)中,這是行不通的。
幸運的是,自動駕駛汽車還有其他方法可以確定它們的位置。特別是他們可以使用激光雷達,該激光雷達通過從物體上反彈激光束并測量光反射回來需要多長時間來確定與物體的距離。用于自動駕駛車輛的典型激光雷達裝置覆蓋150米的范圍,每秒采樣超過100萬個空間點。
此類激光雷達掃描可用于識別本地環境中的不同形狀。車輛的計算機隨后將觀察到的形狀與該區域的高清數字地圖中記錄的形狀進行比較,從而可以始終跟蹤車輛的確切位置。激光雷達還可用于識別,避免行人和其他車輛等臨時障礙物。
激光雷達是一項了不起的技術,但存在兩個問題。首先,這些設備非常昂貴:用于自動駕駛的高端激光雷達的成本下降,但成本很容易超過80,000美元;對于低速應用,合適的設備價格約為4,000美元。而且,激光雷達作為一種光學設備,在惡劣的天氣(如大雨或大霧)下可能無法提供合理的測量結果。
這些車輛上的攝像頭也是如此,這些攝像頭通常用于識別和跟蹤不同對象,例如行車道,交通信號燈和行人的邊界。通常,多個攝像機安裝在車輛周圍。這些攝像機通常以每秒60幀的速度運行,并且所使用的多個攝像機每秒可生成超過1 GB的原始數據。當然,處理大量信息會給車輛的計算機帶來很大的計算需求。從好的方面來說,相機并不是很昂貴。
自動駕駛汽車中的雷達和聲納系統用于避障。他們生成的數據集顯示了距車輛路徑中最近的物體的距離。這些系統的主要優點是它們可以在所有天氣條件下正常工作。聲納通常可以覆蓋10米的范圍,而雷達通常可以覆蓋200米的范圍。像相機一樣,這些傳感器相對便宜,通常每個傳感器的成本不到1,000美元。
傳感器提供的許多測量值都輸入到車輛的計算機中,這些計算機必須整合所有這些信息才能對環境有所了解。近年來迅速發展的一種方法是人工神經網絡和深度學習,在這里起著重要的作用。利用這些技術,計算機可以跟蹤附近行駛的其他車輛以及過馬路的行人,從而確保自動駕駛汽車不會與任何東西碰撞。
當然,引導自動駕駛汽車的計算機所要做的不只是避免撞到東西而已。他們必須對轉向何處以及走多快做出大量決定。為此,車輛的計算機會根據附近的預測以及乘員需要去的地方,在制定行動計劃之前,對附近車輛即將發生的運動進行預測。
最后,自動駕駛汽車需要一個好的地圖。傳統的數字地圖通常是從衛星圖像生成的,并且具有儀表級的精度。盡管這對于人類駕駛員來說已經綽綽有余,但自動駕駛汽車要求車道級信息的準確性更高。因此,需要特殊的高清地圖。
就像傳統的數字地圖一樣,這些高清地圖包含許多信息層。最底層是一個地圖,其中網格單元大約為5 x 5厘米;它是由使用特殊汽車收集的原始激光雷達數據生成的。該網格記錄有關環境中對象的高程和反射信息。
在該基本網格之上,有幾層附加信息。例如,將車道信息添加到柵格地圖,以允許自動駕駛車輛確定它們是否在正確的車道中。除了車道信息外,還會添加交通標志標簽,以通知自動駕駛汽車當地限速,是否正在接近交通信號燈等。這在車輛的攝像頭無法讀取標志的情況下有幫助。
傳統的數字地圖每6到12個月更新一次。為了確保自動駕駛汽車使用的地圖包含最新信息,高清地圖應每周刷新一次。結果,對于一個中型城市,生成和維護高清地圖每年可能要花費數百萬美元。
這些高清地圖上的所有數據都必須存儲在車輛上的固態存儲器中,以便隨時使用,這增加了計算硬件的成本,而計算硬件的功能必須非常強大。從某種意義上說,百度用于自動駕駛的早期計算系統使用了Intel Xeon E5處理器和四到八個Nvidia K80 GPU加速器。該系統每秒可提供64.5萬億個浮點運算,但消耗了約3,000瓦,并產生了大量熱量。它的成本約為30,000美元。
考慮到僅傳感器和計算機的成本就很容易超過100,000美元,所以至少在今天,不難理解為什么自動駕駛汽車如此昂貴。當然,價格會隨著制造總數的增加而下降。但是,尚不清楚如何將創建和維護高清地圖的成本分攤下來。無論如何,要采用更好的技術來解決正常道路和高速公路上自動駕駛所帶來的所有明顯的安全隱患,都將需要時間。
傳感器成本如何下降到2,000美元左右
劉少山和PerceptIn一直在努力解決這些挑戰,重點是在有限的區域內操作且不必與高速交通混為一談的小型低速車輛,例如大學校園和工業園區。
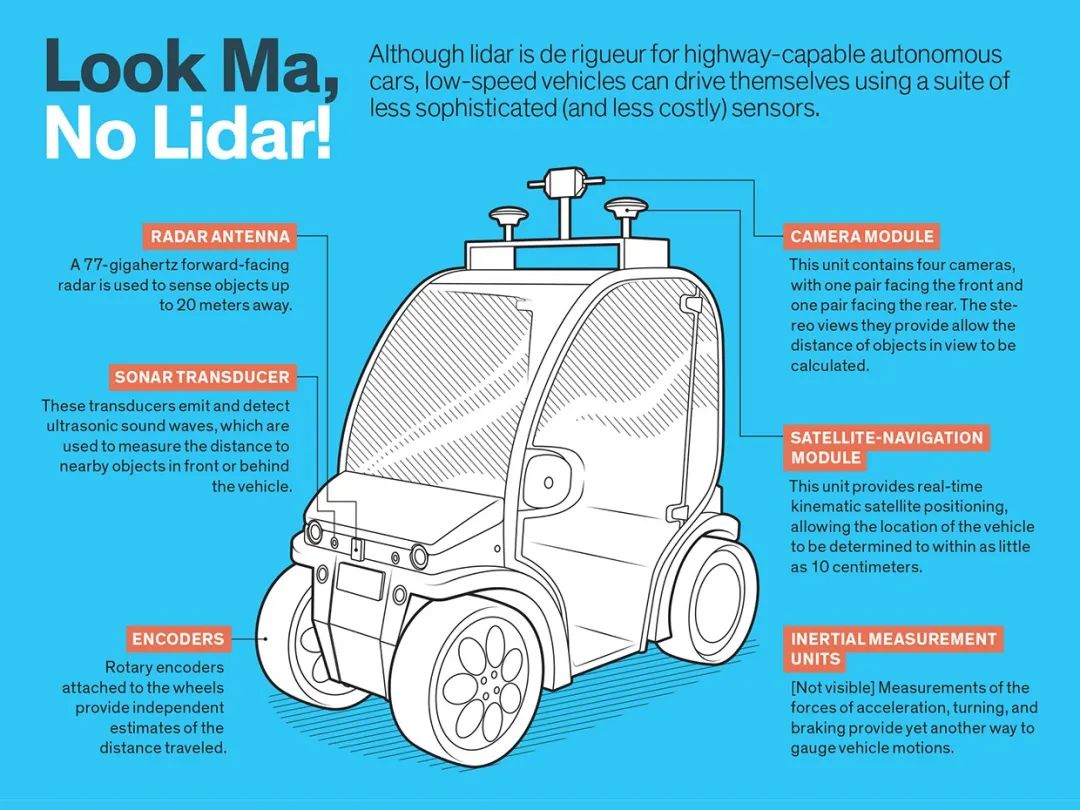
PerceptIn 用來降低成本的主要策略是完全放棄激光雷達,而使用價格更便宜的傳感器:攝像頭,慣性測量單元,衛星定位接收器,車輪編碼器,雷達和聲納。然后可以通過稱為傳感器融合的過程來組合這些傳感器中的每個傳感器提供的數據。
在缺點和優點的平衡之間,這些傳感器趨于相互補充。當一個發生故障或出現故障時,其他人可以接管以確保系統保持可靠性。使用這種傳感器融合方法,傳感器成本最終可能會下降到2,000美元左右。
由于車輛行駛速度很慢,因此最多需要7米就能停止,這比普通汽車要安全得多,后者要花幾十米才能停止。而且由于速度較慢,計算系統的延遲要求不如高速自動駕駛汽車中使用的延遲要求高。
PerceptIn的車輛使用衛星定位進行初始定位。這些衛星導航接收器雖然不如具有高速公路功能的自動駕駛汽車上的系統精確,但仍可提供亞米級精度。車輛的計算機結合了慣性測量單元的攝像機圖像和數據(一種稱為視覺慣性里程法的技術),進一步提高了精度,將位置固定在分米級。
對于成像,PerceptIn已將四個攝像頭集成到一個硬件模塊中。一對面向車輛的前部,另一對面向后部。每對攝像機都提供雙目視覺,從而可以捕獲通常由激光雷達提供的空間信息。此外,這四臺攝像機可以一起捕獲360度的環境視圖,并且各幀之間有足夠的重疊空間區域,以確保視覺測距法可以在任何方向上正常工作。

即使視覺測距法失敗并且衛星定位信號丟失,也不會丟失所有信號。車輛仍然可以使用安裝在車輪上的旋轉編碼器來進行位置更新,這遵循水手們使用了數百年的通用策略,即航位推算。
來自所有這些傳感器的數據集被組合在一起,以使車輛對環境有一個整體的了解。基于這種理解,車輛的計算機可以做出確保平穩安全行駛所需的決定。
該車輛還具有防撞系統,該系統獨立于其主計算機運行,提供了最后一道防線。它使用毫米波雷達和聲納的組合來檢測車輛何時位于距離對象5米以內的情況下,在這種情況下會立即停止。
依靠便宜的傳感器只是PerceptIn降低成本的一種策略。另一個措施是將計算技術推向傳感器,以減少對車輛主計算機,總成本不到1,500美元的普通PC和峰值系統功率僅為400 W的需求。
例如,PerceptIn的相機模塊可以每秒生成400兆字節的圖像信息。如果將所有這些數據都傳輸到主計算機進行處理,則該計算機將必須極其復雜,這將在可靠性,功耗和成本方面產生重大后果。相反,PerceptIn使每個傳感器模塊執行盡可能多的計算。這減輕了主計算機的負擔并簡化了其設計。
更具體地,GPU被嵌入到相機模塊中以從原始圖像提取特征。然后,僅將提取的特征發送到主計算機,從而將數據傳輸速率降低了數千倍。
限制成本的另一種方法涉及高清地圖的創建和維護。PerceptIn并沒有使用配備激光雷達裝置的車輛來提供地圖數據,而是使用視覺信息增強了現有的數字地圖,以達到分米級的精度。
生成的高精度視覺地圖(如它們替換的基于激光雷達的高清地圖)由多層組成。底層可以是任何現有的數字地圖,例如OpenStreetMap項目中的一個。該底層的分辨率約為1米。第二層記錄路面的視覺特征,以將地圖分辨率提高到分米級。第三層(也以分米分辨率保存)記錄了環境其他部分的視覺特征,例如標志,建筑物,樹木,柵欄和燈桿。第四層是語義層,其中包含車道標記,交通標志標簽等。
盡管在過去十年中取得了長足進步,但可能要再過十年或更長時間,全自動駕駛汽車才能開始駛向大多數道路和高速公路。同時,一種實用的方法是在限制條件下使用低速自動駕駛汽車。包括Navya,EasyMile和May Mobility在內的數家公司以及PerceptIn一直在認真地追求這一戰略,并取得了良好的進展。
最終,隨著相關技術的發展,車輛的類型和部署可以擴展,最終包括可以達到或超過專業駕駛員性能的車輛。
PerceptIn已表明,制造小型低速自動駕駛汽車的成本遠低于制造具有高速公路功能的自動駕駛汽車的成本。當大量生產車輛時,我們預計制造成本將低于10,000美元。在不久的將來,這種清潔能源的自動班車可能會在諸如曼哈頓中央商務區等城市中心載客,目前那里的平均交通速度僅為每小時7英里。這樣的機隊將大大降低騎手的成本,改善交通狀況,增強安全性,并改善空氣質量。解決世界高速公路上的自動駕駛的問題可能會在以后出現。
